Система стабилизации движения ESP
(Electronic Stability Programm)
История создания системы стабилизации движения ESP
Система ESP была создана в 1995 году, но громко заявить о себе ей удалось только через два года, когда дебютировал первый компактный Mercedes-Benz А-класса. При его проектировании были допущены серьезные ошибки, которые привели к тому, что новая модель имела склонность к опрокидыванию даже не на очень высокой скорости при выполнении маневров типа «переставка» («лосиный» тест, объезд препятствия).
В Европе, давно помешанной (в хорошем смысле) на безопасности, разразился настоящий скандал. Продажи автомобилей Mercedes-Benz А-класса были приостановлены, а уже проданные машины - отозваны для устранения недостатков. Перед инженерами компании Daimler-Benz встала непростая задача: как, не перепроектируя заново автомобиль и сохранив его потребительские качества, решить проблему повышения устойчивости. Эта задача была решена в значительной степени за счет установки с февраля 1998 года на автомобили Mercedes-Benz А-класса соответствующим образом настроенной системы ESP.
Главный контроллер ESP - это пара микропроцессоров, каждый из которых имеет по 56 Кбайт памяти. Система позволяет, например, считывать и обрабатывать значения, выдаваемые датчиками скорости вращения колес с 20 миллисекундным интервалом. Помимо А-класса, система ESP является стандартным оборудованием для Mercedes S-класса, E-класса и других. На автомобилях фирмы DaimlerChrysler применяются системы ESP от лидера в данной области - фирмы Bosch. Системы ESP производства Bosch используют также фирмы BMW, Volkswagen, Audi, Porsche и другие.
Работа системы стабилизации движения ESP
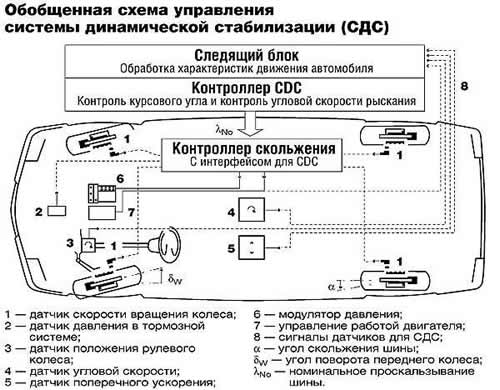
Электронная программа стабилизации или, как ее обычно называют, система стабилизации движения (ESP) срабатывает в опасных ситуациях, когда возможна или уже произошла потеря управляемости автомобилем. Путем притормаживания отдельных колес система стабилизирует движение. Она вступает в работу, когда, например, из-за большой скорости при прохождении правого поворота передние колеса сносит с заданной траектории в направлении действия сил инерции, т.е. по радиусу большему, чем радиус поворота. ESP в этом случае притормаживает заднее колесо, идущее по внутреннему радиусу поворота, придавая автомобилю большую поворачиваемость и направляя его в поворот. Одновременно с притормаживанием колес ESP снижает обороты двигателя. Если при прохождении поворота происходит занос задней части автомобиля, ESP активизирует тормоз левого переднего колеса, идущего по наружному радиусу поворота. Таким образом, появляется момент противовращения, исключающий боковой занос. Когда скользят все четыре колеса, ESP самостоятельно решает, тормозные механизмы каких колес должны вступить в работу. Время реакции ESP - 20 миллисекунд. Работает система на любых скоростях и в любых режимах движения.
Данная система пока является наиболее эффективной системой безопасности. Она способна компенсировать ошибки водителя, нейтрализуя и исключая занос, когда контроль над автомобилем уже потерян.
Безусловно, ESP высокоэффективная система. Однако, в действительности ее возможности ограничены. Причиной этого являются законы физики, изменить которые электроника не в силах. Поэтому если радиус поворота слишком мал или скорость в повороте превышает разумные границы, даже самая совершенная программа стабилизации движения здесь не поможет.